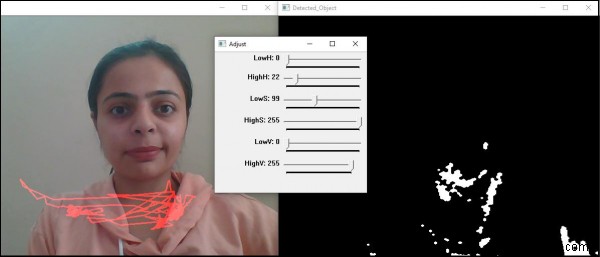
การติดตามสีคล้ายกับการตรวจจับสี เพื่อวัตถุประสงค์ในการติดตาม เราได้เพิ่มบรรทัดพิเศษสองสามบรรทัดเพื่อคำนวณพื้นที่ของวัตถุที่ตรวจพบ จากนั้นติดตามตำแหน่งปัจจุบันของพื้นที่นั้น และสุดท้ายใช้ฟังก์ชัน line() ของ OpenCV เพื่อแสดงเส้นทางการเคลื่อนที่ของวัตถุ
โปรแกรมต่อไปนี้สาธิตวิธีการติดตามสีใน OpenCV โดยใช้ C++
ตัวอย่าง
#include<iostream>
#include<opencv2/highgui/highgui.hpp>
#include<opencv2/imgproc/imgproc.hpp>
using namespace std;
using namespace cv;
int main(int argc, char** argv) {
VideoCapture video_load(0);//capturing video from default camera//
namedWindow("Adjust");//declaring window to show the image//
int Hue_Low= 0;//lower range of hue//
int Hue_high = 22;//upper range of hue//
int Sat_Low =99;//lower range of saturation//
int Sat_high = 255;//upper range of saturation//
int Val_Low = 0;//lower range of value//
int Val_high = 255;//upper range of value//
createTrackbar("LowH", "Adjust", &Hue_Low, 179);//track-bar for min hue//
createTrackbar("HighH","Adjust", &Hue_high, 179);//track-bar for max hue//
createTrackbar("LowS", "Adjust", &Sat_Low, 255);//track-bar for min saturation//
createTrackbar("HighS", "Adjust", &Sat_high, 255);// track-bar for max saturation//
createTrackbar("LowV", "Adjust", &Val_Low,255);//track-bar for min value//
createTrackbar("HighV", "Adjust", &Val_high, 255);// track - bar for max value//
int Horizontal_Last = -1;//initial horizontal position//
int vertical_Last = -1;//initial vertical position//
Mat temp;//declaring a matrix to load frames from video stream//
video_load.read(temp);//loading frames from video stream//
Mat track_motion = Mat::zeros(temp.size(), CV_8UC3);//creating black matrix for detection//
while (true) {
Mat actual_Image;//declaring a ,atrix for actual image//
bool temp_load= video_load.read(actual_Image);//loading frames from video to the matrix//
Mat converted_to_HSV;//declaring a matrix to store converted image//
cvtColor(actual_Image, converted_to_HSV, COLOR_BGR2HSV);//converting BGR image to HSV//
Mat adjusted_frame;//declaring a matrix to detected color//
inRange(converted_to_HSV,Scalar(Hue_Low, Sat_Low, Val_Low),
Scalar(Hue_high, Sat_high, Val_high), adjusted_frame);//applying change of values of track-bars//
erode(adjusted_frame,adjusted_frame,getStructuringElement(MORPH_ELLIPSE, Size(5, 5)));//morphological opening for removing small objects from foreground//
dilate(adjusted_frame, adjusted_frame,getStructuringElement(MORPH_ELLIPSE, Size(5, 5)));//morphological opening for removing small object from foreground//
dilate(adjusted_frame, adjusted_frame,getStructuringElement(MORPH_ELLIPSE, Size(5, 5)));//morphological closing for filling up small holes in foreground//
erode(adjusted_frame, adjusted_frame, getStructuringElement(MORPH_ELLIPSE, Size(5, 5)));//morphological closing for filling up small holes in foreground//
Moments detecting_object = moments(adjusted_frame);//creating an object from detected color frame//
double vertical_moment = detecting_object.m01;//getting value of vertical position//
double horizontal_moment = detecting_object.m10;//getting value of horizontal position//
double tracking_area = detecting_object.m00;//getting area of the object//
if (tracking_area > 10000){ //when area of the object is greater than 10000 pixels//
int posX = horizontal_moment / tracking_area;//calculate the horizontal position of the object//
int posY = vertical_moment / tracking_area;//calculate the vertical position of the object//
if (Horizontal_Last >= 0 && vertical_Last >= 0 && posX >= 0 && posY >= 0){ //when the detected object moves//
line(track_motion, Point(posX, posY), Point(Horizontal_Last, vertical_Last), Scalar(0, 0, 255), 2);//draw lines of red color on the path of detected object;s motion//
}
Horizontal_Last = posX;//getting new horizontal position//
vertical_Last = posY;// getting new vertical position value//
}
imshow("Detected_Object", adjusted_frame);//showing detected object//
actual_Image = actual_Image + track_motion;//drawing continuous line in original video frames//
imshow("Actual",actual_Image);//showing original video//
cout << "position of the object is:" << Horizontal_Last << "," << vertical_Last << endl;//showing tracked co-ordinated values//
if(waitKey(30)==27){ //if esc is pressed loop will break//
cout << "esc key is pressed by user" << endl;
break;
}
}
return 0;
} ผลลัพธ์